Lego Robotics with Arduino 1
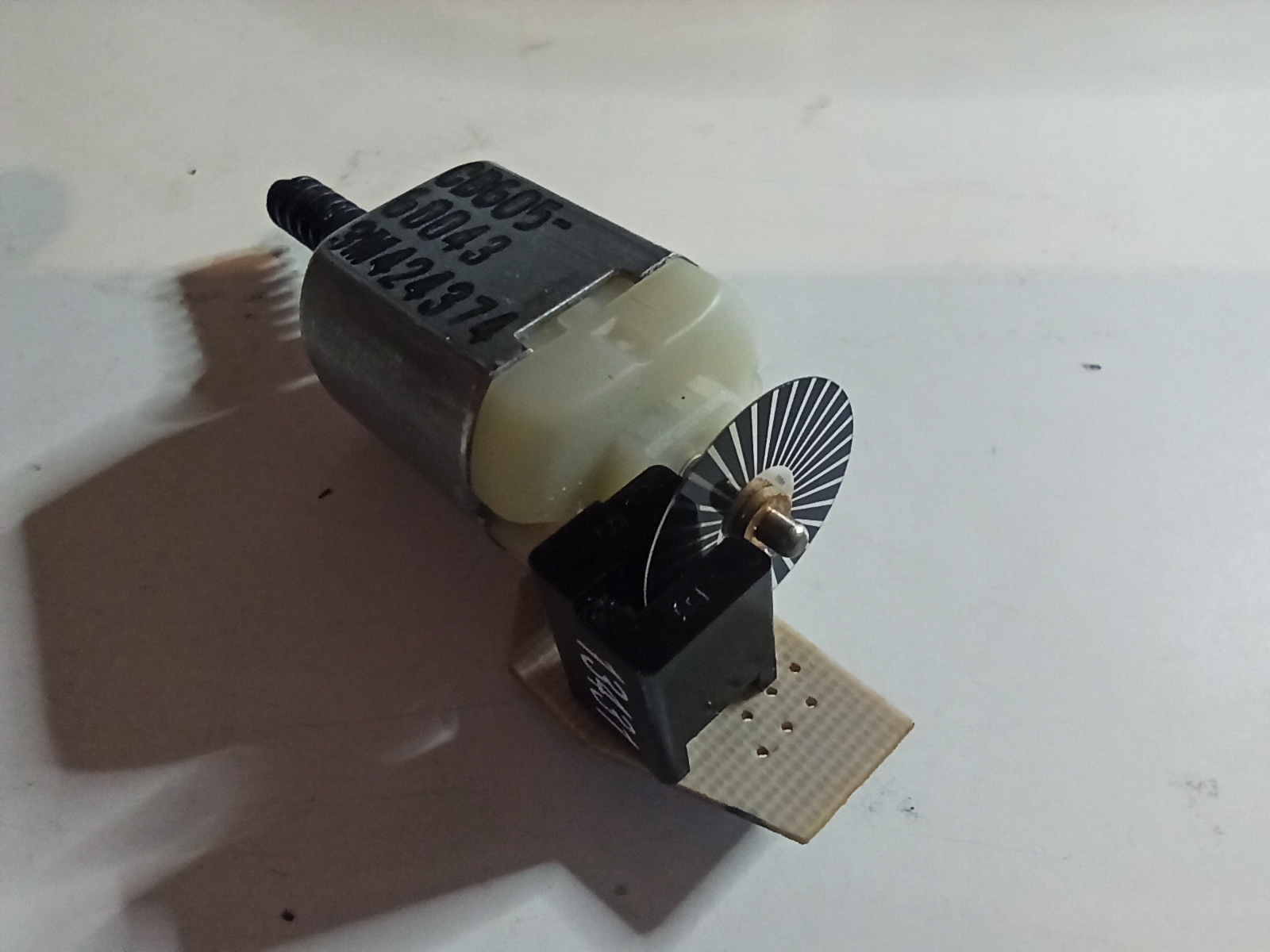
I have a bunch of these little motors recovered from broken printers. They have a neat feedback system built onto the back using a slotted infrared sensor and an encoding wheel. All that needs to be added is a 74LS14 (or equivalent) Schmitt trigger to clean up the pulses coming from the infrared sensor.

I modified the motor spindle to take the smallest Lego Technic gear and built a little test rig with a linear actuator type arrangement. The motors can be glued upside-down to a 4x2 stud Lego plate and occupy roughly the same space as a classic Lego Technic 4.5 volt motor.
VIDEO - Lego Robotics Test Rig

The motor is driven by a L293NE H-bridge IC with another of the Schmitt inverters used to reduce pin count to just 2 - MotorDirection and MotorSpeed. The code uses an interrupt to count the incoming pulses on a pin and also detects a stall situation by checking if the pulse count has stopped when the motor is supposed to be running.
TEST CODE
// Lego Robotics Test 002// Glenn Walsh 03/10/2022// Testing IR slot position feedback and limit detectionvolatile int pulseCount = 0;volatile int lastPulseCount = 0;int maxCount = 0;const int speedPin = 9; // PWM speed pin (0-255)const int directionPin = 8; // Direction pin 1/0bool motorDirection = 0;bool motorRun = 0;long lastChangeTime = 0;void setup() {// SETUP pinsSerial.begin(9600);pinMode(speedPin, OUTPUT); // PWM speed pinpinMode(directionPin, OUTPUT); // Direction pin 1stopMotor() ; // Set speed to stopattachInterrupt(0, pulseCounter, FALLING);getMaxPulses();Serial.println(maxCount);}void loop() {// TEST - goto one end and then come the other way// 30 pulses at a time until close to maxCount valuegotoEndPosition(1);pulseCount = 0;digitalWrite(directionPin, 0);while (pulseCount < (maxCount - 30)) {startMotor(255);lastPulseCount = pulseCount;while (pulseCount - lastPulseCount < 20) {// WAIT}stopMotor();newDelay(1000);}}void pulseCounter() {pulseCount++;}void getMaxPulses () {// Start by moving to one end in case actuator is in the middle// Ignore pulses this timegotoEndPosition (1);// Run motor each way and take average number of pulsesgotoEndPosition (0);maxCount = pulseCount; // Get average countpulseCount = 0;gotoEndPosition (1);maxCount = (pulseCount + maxCount) / 2; // Get average countpulseCount = 0;}void gotoEndPosition(bool motorEnd) {// Move to end point count pulses and stopdigitalWrite(directionPin, motorEnd);startMotor(255);while (motorRun) {lastPulseCount = pulseCount;newDelay(100);if (pulseCount - lastPulseCount < 25) {// STALL!// Not enough pulses received in 100ms so motor has stalledstopMotor();}}}void stopMotor() {// Stop the motoranalogWrite(speedPin, 0);motorRun = false;}void startMotor(int speedValue) {// Start the motor with at given speed (0-255)analogWrite(speedPin, speedValue);motorRun = true;}void newDelay(int period) {// Non-blocking short delay to allow interrupt to work as expectedlastChangeTime = millis();while (millis() <= lastChangeTime + period) {// WAIT!}}




Comments
Post a Comment